The china stepper motors don’t have a continuous motion, therefore they cannot position themselves in every angle.
They work like the seconds in an analog watch, which they only have 60 unique positions.
As expected, the more steps the motor has, the better resolution we could achieve but with a reduced speed.
The common motors used inside machines and robotics use to have 200 steps per revolution. That is 360º/200 = 1.8º per step.
Angle per step
That is a different view over the number of turns per revolution. It is the equivalent way to give you number of steps or angle per step. 200 steps per turn is equivalent to 1.8º per step.
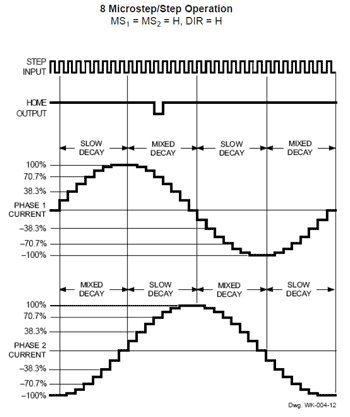
Micro stepping
This is a topic which generates lots of questions. Specially since the RAMPS boards contain jumpers to select the number of microsteps.
The idea behind this technique is based on not sending 100% of the power to the magnets, thereby the motor will not complete 100% of the step.
The microstepping designed drivers send energy using a sinusoidal wave.
Using this technique, in theory, we lose torque and power, but we gain resolution and fluidity.
Con esta técnica, en teoría perdemos torque y fuerza, pero ganamos resolución y fluidez.
And you can really see it. If you deactivate the microstepping (just remove the jumpers on the RAMPS), the movement becomes abrupt. Personally, every machine i put together i always set them to the maximum setting.

Gearbox
If the motor is connected to a gear and the gear to another gear we obtain a gearbox.


If the second gear is bigger, we will apply more torque while trading speed.
If the gear is smaller, we will go faster while trading torque.
It is very common to use gearboxes, and there are motors which have then integrated, saving us the installation problems.
Gearboxes are specified in ratios. And it is very common to see number of teeth per gear.
An example, 32:8 means that we will go from a 32 teeth gear to one of 8. For each 32 revolutions, the second gear will turn 8, therefore the relationship is 32/8 = 4 times.
The use of gearboxes stepper motor depends on the machine and the torque and speed required.
Holding torque
I have to admit that i had to search Google for the term. I’ve been always seen it referred as simply torque.
In lame terms, it is the measurement of the torque that a motor can apply to hold a fixed weight.
To measure it, imagine you have a 1 meter long staff, and on its tip we set a 1 kg weight.
Now we have to lift that staff with one hand only. Many people will not be able to do it.
Now imagine that instead of 1 Kg, we have 2 Kg. It makes things worst!
What about having a 5 meters staff and 500 grams?. Although there is less weight , to lift half a kilo at 5 meters distance with only one had is quite difficult.
That is why, we measure the torque in Newtons per meter, since it depends on the weight and distance to the motor shaft.
3D printers usually require a lot of torque at the extruder in order to push filament, especially the ones trying to print with a 3mm diameter.
To give you an idea, the traditional extruder Wade (the most known extruder for Prusas) is able to produce a torque of 40 Newtons per cm.
However a laser engraver it almost doesn’t require torque, since it doesn’t have to push anything.
The stepper motors usually have less torque than DC motors. But instead, it is easier to hold them in place.
To keep a DC motor standstill, it is required to re-calculate the position in a constant feedback loop.
No comments:
Post a Comment